1.创建功能包
在ROS工作空间ROS_ws的src文件夹目录下创建一个功能包,命名为communication_pkg,并编译完成。
2.节点编程与服务数据定义
2.1案例说明
定义一个客户端Client,通过自定义的服务请求Request将两个整数发送给服务器Server,同时服务器Server将两个整数相加后,再通过自定义的服务应答Response将两个整数的和反馈到客户端Client。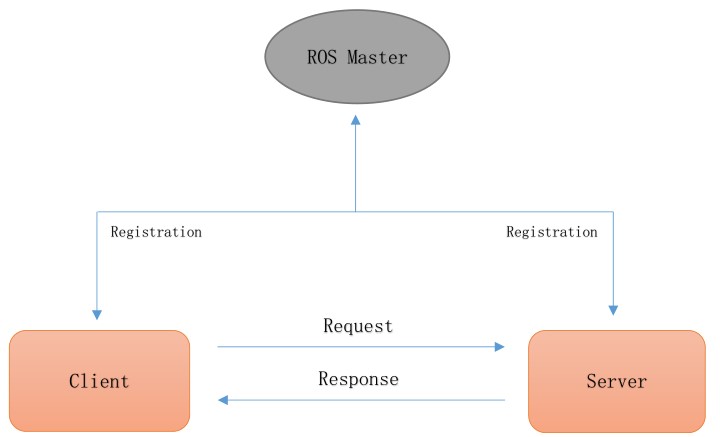
2.2服务数据的定义
在功能包目录下创建一个新的文件夹,命名为srv,并在此文件夹中创建一个空文件AddTwoInts.srv。
在AddTwoInts.srv文件中输入以下代码,定义服务消息内容。1
2
3
4int64 a
int64 b
---
int64 sum
说明:
使用“—-”作为分隔符,“—-”上面代表服务请求的消息内容,“—-”下面代表服务应答的消息内容。
相关资料:https://wiki.ros.org/srv
2.3创建.cpp文件
在功能包下面的src文件夹目录下创建一个空文件client.cpp。
2.4客户端编程
打开上面所创建的文件client.cpp,输入以下代码。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40#include <cstdlib>
#include "ros/ros.h"
#include "communication_pkg/AddTwoInts.h"
int main(int argc, char **argv)
{
//初始化ROS节点
ros::init(argc, argv, "add_two_ints_client");
//从终端获取数据
if(argc != 3)
{
ROS_INFO("usage: add_two_ints_client X Y");
return 1;
}
//创建句柄
ros::NodeHandle n;
//创建一个客户端,定义服务请求数据类型communication_pkg::AddTwoInts
ros::ServiceClient client = n.serviceClient<communication_pkg::AddTwoInts>("add_two_ints");
//定义服务消息内容
communication_pkg::AddTwoInts srv;
srv.request.a = atoll(argv[1]);
srv.request.b = atoll(argv[2]);
//发布服务请求,等待应答结果
if(client.call(srv))
{
ROS_INFO("Sum: %ld", (long int)srv.response.sum);
}
else
{
ROS_ERROR("Failed to call service add_two_ints");
return 1;
}
return 0;
}
说明:
◆头文件cstdlib.h是C++里面的一个常用函数库,等价于C中的stdlib.h,可以提供一些函数与符号常量。
◆头文件ros/ros.h包含了标准ROS类的声明,在每一个ROS程序中都需要包含它。
◆头文件communication_pkg/AddTwoInts.h是由AddTwoInts.srv编译扩展得到,包含了针对C++类的定义等,它存放在工作空间的devel/include路径下的communication_pkg文件夹中。
◆int main(int argc, char **argv)是main函数的一种定义形式,其参数argc和argv用于运行时,把命令行参数传入主程序,其中arg是指arguments,即参数。
(1)int argc:英文名为arguments count(参数计数),表示运行程序传送给main函数的命令行参数总个数,包括可执行程序名,其中当argc=1时表示只有一个程序名称,此时存储在argv[0]中。
(2) char **argv:英文名为arguments value/vector(参数值),用来存放指向字符串参数的指针数组,每个元素指向一个参数,空格分隔参数,其长度为argc。数组下标从0开始,argv[argc]=NULL。argv[0]指向程序运行时的全路名;argv[1]指向程序在DOS命令中执行程序名后的第一个字符串;argv[2]指向执行程序名后的第二个字符串。
◆ros::init(argc, argv, “add_two_ints_client”)的作用是初始化ROS节点,第三个参数表示节点名称,这个节点名是唯一的。
◆if(argc != 3){…}表示当终端命令行输入的参数数量不等于3,则执行这段代码。
◆ros::NodeHandle n;的作用是创建句柄,启动ROS节点。
◆ros::ServiceClient client = n.serviceClient1
2
3communication_pkg::AddTwoInts srv;
srv.request.a = atoll(argv[1]);
srv.request.b = atoll(argv[2]);
◆这是创建服务请求和服务应答的其中一种方法。它定义了一个service_example::AddTwoInts类型的对象,该对象中的成员正是srv文件中定义的a、b、sum,将终端命令行输入的两个数填充到数据成员a、b中。atoll()函数的作用是将字符串转换成长长整型数(long long int),即srv.request.a = atoll(argv[1])是将命令行输入的字符串中的第一个数转换成长长整型数,并赋值给成员a,srv.request.b = atoll(argv[2])则同理。
◆if(client.call(srv)){…}表示向ROS网络发起服务请求。由于服务请求处于阻塞状态,需要等待请求发起完成后才能返回值。如果服务调用成功,则call()将返回true,并且srv.response中的值将有效。如果调用失败,则call()将返回false,并且srv.response中的值将无效。
◆ROS_INFO()和ROS_ERROR()用于输出日志信息,日志消息分为五个不同的严重级别,按照严重性程度递增,分别为DEBUG、INFO、WARN、ERROR、FATAL。
综上所述,实现一个客户端的步骤大致可分为以下几点:
(1)初始化ROS节点;
(2)创建client实例;
(3)发布服务请求数据;
(4)等待Server处理之后的应答结果。
2.5服务器编程
在src文件夹下再创建一个空文件server.cpp,输入以下代码。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32#include "ros/ros.h"
#include "communication_pkg/AddTwoInts.h"
//服务回调函数,输入为服务请求Req,输出为服务应答Res
bool add(communication_pkg::AddTwoInts::Request &req,
communication_pkg::AddTwoInts::Response &res)
{
//将两个数相加,并将结果存放在变量sum中
res.sum = req.a + req.b;
ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b);
ROS_INFO("sending back response: [%ld]", (long int)res.sum);
return true;
}
int main(int argc, char **argv)
{
//初始化ROS节点
ros::init(argc, argv, "add_two_ints_server");
//创建句柄
ros::NodeHandle n;
//创建服务器,登记回调函数
ros::ServiceServer service = n.advertiseService("add_two_ints", add);
//循环等待
ROS_INFO("Ready to add two ints.");
ros::spin();
return 0;
}
说明:
◆main函数中一开始都是类似的,初始化ROS节点,创建句柄,从而启动ROS节点。
◆ros::ServiceServer service = n.advertiseService(“add_two_ints”, add);的作用是创建服务,并将服务加入到ROS网络中。这个服务在ROS网络中以add_two_ints命名,并且作为唯一标识,以便于其他节点通过服务名称进行请求。当接收到服务请求后,则调用add()回调函数。
◆ros::spin()的作用是让程序进入自循环的挂起状态,从而让程序以最好的效率接收客户端的请求并调用回调函数。
◆服务回调函数的表示形式如下:1
bool callback(MReq &request, MRes &response)
其中MReq和MRes与提供给advertiseService()的请求/应答的数据类型相匹配。回调函数的返回值若为true,则表示服务请求成功,并且服务应答已填充必要的数据。若返回值为false则表示服务请求失败,并且服务应答将不会发送给客户端。
◆回调函数add(communication_pkg::AddTwoInts::Request &req, communication_pkg::AddTwoInts::Response &res)的作用是实现两个int型整数求和的服务,两个整数从request获取,求和结果填充到response里,request与response的具体数据类型在srv文件中被定义。
综上所述,实现一个服务器的步骤大致可分为以下几点:
(1)初始化ROS节点;
(2)创建Server实例;
(3)循环等待服务请求,进入回调函数;
(4)在回调函数中完成服务功能的处理,并反馈应答数据。
附相关资料:
(1)http://wiki.ros.org/ROS/Tutorials/WritingServiceClient%28c%2B%2B%29
(2)http://wiki.ros.org/roscpp/Overview/Services
3.配置与编译
3.1在CMaKeLists.txt中添加编译选项
打开功能包中的CMaKeLists.txt文件,在如下位置的find_package中添加功能包,以便于(节点)调用它们生成消息。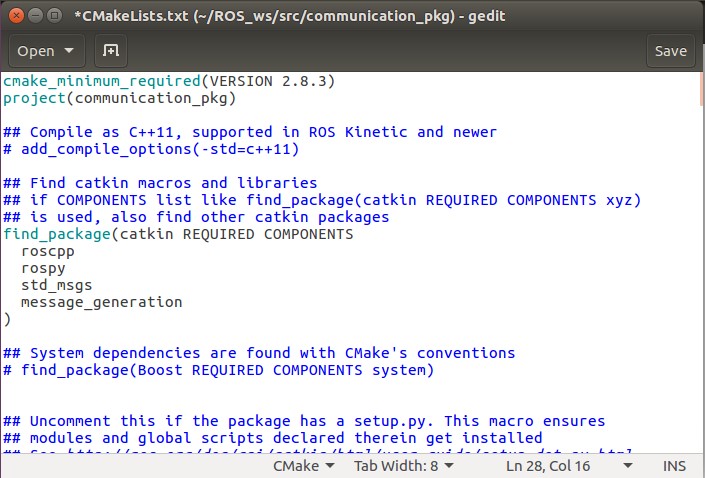
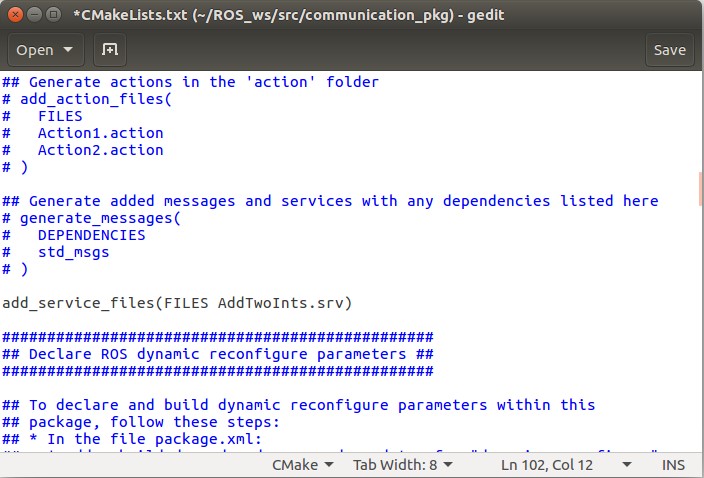
在如下位置添加相关的.srv文件,确保了CMake在重新配置时知道这些新添加的.srv文件,同时添加.srv文件在生成消息时的所有依赖项(功能包)。1
add_service_files(FILES AddTwoInts.srv)
将如下位置中CATLIN_DEPENDS前面的“#”去掉。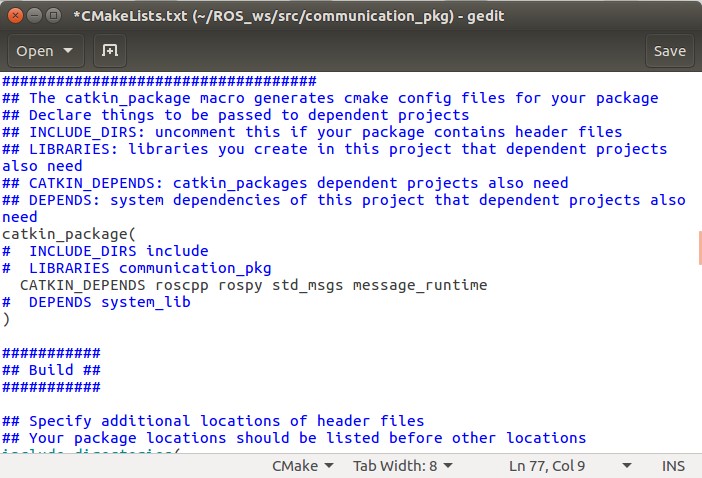
在如下位置进行配置,add_executable(client src/client.cpp)的作用是将src文件夹下的client.cpp文件编译成名为client的可执行文件。target_link_libraries(client ${catkin_LIBRARIES})的作用是将client可执行文件与ROS相关的库链接。add_dependencies(client ${PROJECT_NAME}_gencpp)的作用是将client可执行文件与一些动态生成的文件链接。1
2
3
4
5
6
7add_executable(server src/server.cpp)
target_link_libraries(server ${catkin_LIBRARIES})
add_dependencies(server ${PROJECT_NAME}_gencpp)
add_executable(client src/client.cpp)
target_link_libraries(client ${catkin_LIBRARIES})
add_dependencies(client ${PROJECT_NAME}_gencpp)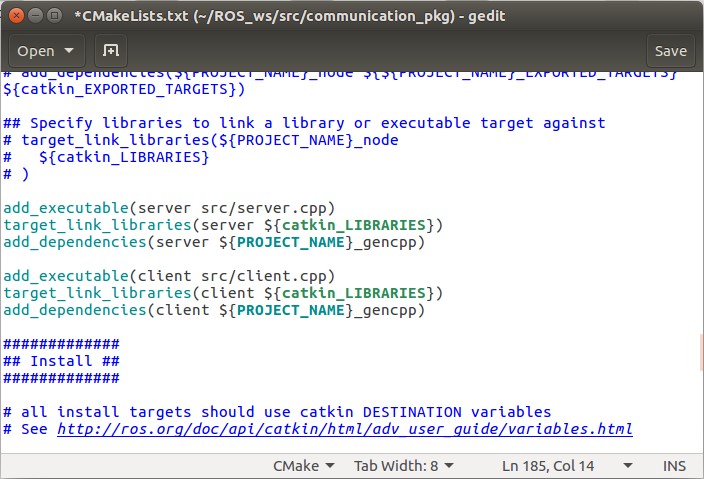
3.2在package.xml中添加功能包依赖
打开功能包中的package.xml文件,在如下位置添加功能包依赖。1
2<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>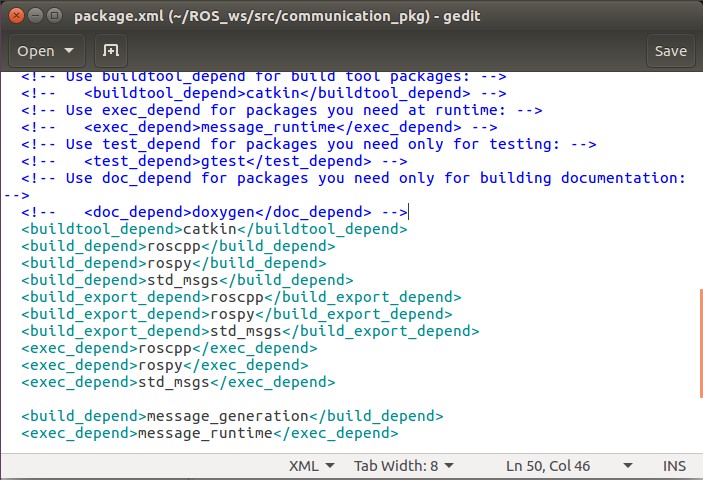
说明:1
<buildtool_depend>catkin</buildtool_depend>
这条语句表示需要依赖catkin工具包用于使用catkin_make指令进行编译。1
<build_export_depend>roscpp</build_export_depend>
这条语句表示编译后导出相关文件需要依赖roscpp功能包。1
<build_depend>message_generation</build_depend>
这条语句表示在编译时会依赖一个动态产生message的功能包。1
<exec_depend>message_runtime</exec_depend>
这条语句表示在运行时会依赖message_runtime的功能包。
3.3编译文件
在/ROS_ws文件夹路径下打开一个新的终端,输入以下代码进行编译。1
$ catkin_make
编译完成后,输入以下代码运行主节点。1
$ roscore
打开一个新的终端,配置环境变量后,输入以下代码运行节点。1
$ rosrun communication_pkg client 整数1 整数2
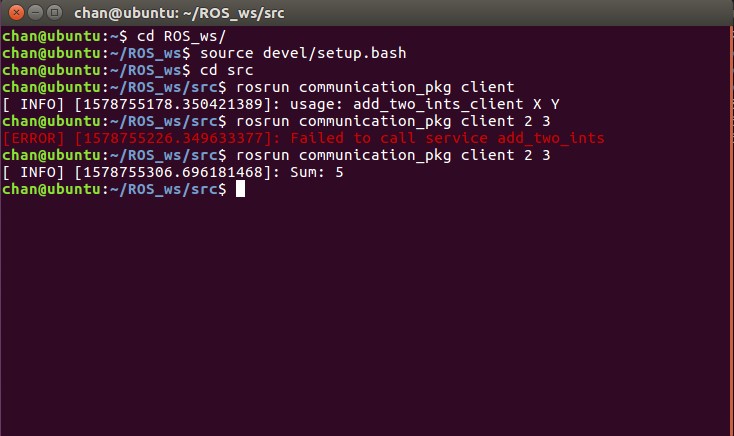
如果rosrun指令后面缺少需要相加的两个数,则会报如下错误。
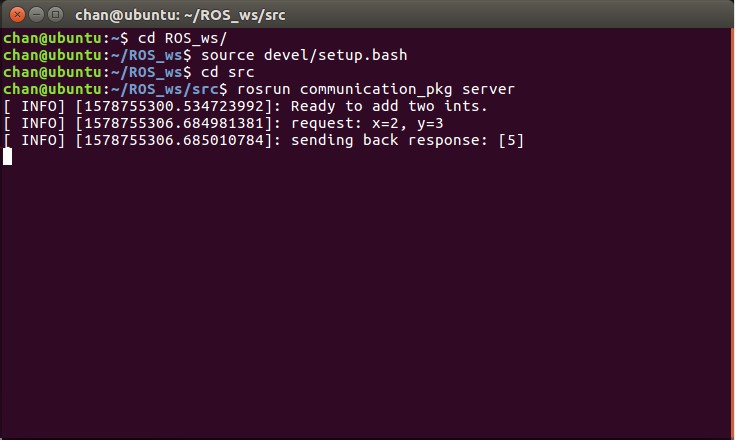
打开一个新的终端,配置环境变量后,输入以下代码运行节点。1
$ rosrun communication_pkg server
若想停止运行,关闭终端,使用快捷键Ctrl+c即可