1.全局路径的读取
waypoint_loader.py的作用是读取.csv文件中的路径点信息,并发布消息waypoints和base_path,其中waypoints包含了路径点的位置信息、小车的期望速度和表明小车是前进还是后退的状态位,base_path包含了实现Rviz可视化的路径点坐标。1
2
3
4
5
6
7def new_waypoint_loader(self, path):
if os.path.isfile(path):
waypoints, base_path = self.load_waypoints(path)
self.publish(waypoints, base_path)
rospy.loginfo('Waypoint Loded')
else:
rospy.logerr('%s is not a file', path)
说明:
●os.path.isfile(path)用于判断某一对象是否为文件,其中path必须为绝对路径。
●self.load_waypoints(path)用于加载.csv文件,并以包含路径信息的消息作为返回值。
●self.publish(waypoints, base_path)用于发布话题消息。
●rospy.loginfo(‘Waypoint Loded’)用于输出INFO日志信息。
●rospy.logerr(‘%s is not a file’, path)当判断该对象不为文件时,输出ERROR日志信息。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24def load_waypoints(self, fname):
waypoints = []
base_path = Path()
base_path.header.frame_id = 'world'
with open(fname) as wfile:
reader = csv.DictReader(wfile, CSV_HEADER)
for wp in reader:
p = Waypoint()
p.pose.pose.position.x = float(wp['x'])
p.pose.pose.position.y = float(wp['y'])
q = self.quaternion_from_yaw(float(wp['yaw']))
p.pose.pose.orientation = Quaternion(*q)
p.twist.twist.linear.x = float(self.velocity)
p.forward = True
waypoints.append(p)
path_element = PoseStamped()
path_element.pose.position.x = p.pose.pose.position.x
path_element.pose.position.y = p.pose.pose.position.y
base_path.poses.append(path_element)
waypoints = self.decelerate(waypoints)
return waypoints,base_path
说明:
●waypoints = []创建了一个空列表,命名为waypoint。
●base_path = Path()和base_path.header.frame_id = ‘world’定义了一个Path类的对象base_path,并以world作为frame id。
●with open(fname) as wfile的作用是打开文件(保证在文件出错后能够正常关闭文件),其中fname在此处是文件的绝对路径。
●reader = csv.DictReader(wfile, CSV_HEADER)以CSV_HEADER的构造格式,即‘x’、‘y’和‘yaw’格式读取文件内容。
●for wp in reader:在此处遍历文件中的每一行。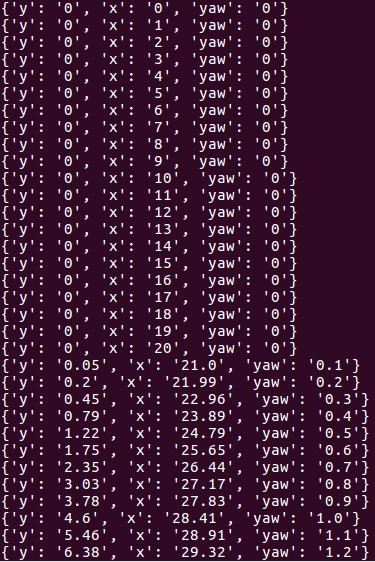
●p = Waypoint()定义了一个Waypoint类的对象,其中Waypoint类在styx_msgs文件夹的Waypoint.msg中进行了自定义,包含了geometry_msgs/PoseStamped pose、geometry_msgs/TwistStamped twist和bool forward,分别表示小车在环境中的x、y坐标、小车的期望速度以及表明小车是前进还是后退的标志位。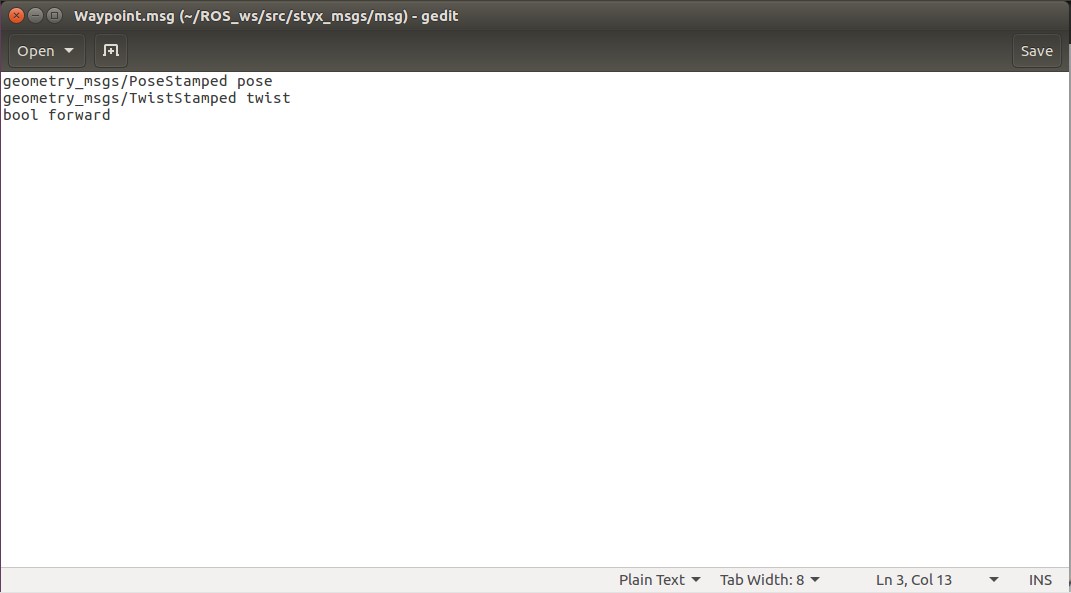
●p.pose.pose.position.x = float(wp[‘x’])和p.pose.pose.position.y = float(wp[‘y’])用于将文件中的x、y所对应的数据填充到相应的消息内容中。
●q = self.quaternion_from_yaw(float(wp[‘yaw’]))即调用tf.transformations.quaternion_from_euler(0., 0., yaw)该函数,用于将 (0., 0., yaw)欧拉角转换成四元数quaternion。
●p.pose.pose.orientation = Quaternion(*q)该操作相当于p.pose.pose.orientation = Quaternion(q[0], q[1], q[2], q[3]),用于将元祖扩展成参数列表,并将四元数数据填充到相应的消息内容中。
●p.twist.twist.linear.x = float(self.velocity)用于将期望的线速度值填充到相应的消息内容中。
●waypoints.append(p)用于将Waypoint类的对象p,即路径信息添加到列表waypoints中。
●path_element = PoseStamped()定义了一个PoseStamped类的对象,用于在Rviz中可视化路径。
●waypoints = self.decelerate(waypoints)根据小车当前位置与终点位置来控制小车速度,并保证在终点位置速度为零。1
2
3
4
5
6
7
8
9
10def decelerate(self, waypoints):
last = waypoints[-1]
last.twist.twist.linear.x = 0.
for wp in waypoints[:-1][::-1]:
dist = self.distance(wp.pose.pose.position, last.pose.pose.position)
vel = math.sqrt(2 * MAX_DECEL * dist)
if vel < 1.:
vel = 0.
wp.twist.twist.linear.x = min(vel, wp.twist.twist.linear.x)
return waypoints
说明:
●last = waypoints[-1]用于将waypoints列表中的最后一个值,即路径的终点信息赋给变量last。
●for wp in waypoints[:-1][::-1]:用于遍历waypoints列表中的所有值。
●dist = self.distance(wp.pose.pose.position, last.pose.pose.position)用于计算当前坐标点与终点坐标的距离。
●vel = math.sqrt(2 * MAX_DECEL * dist)根据小车当前位置距离终点的路程dist、人为设定的减速度MAX_DECEL和到达终点时的速度(速度为零)来计算得到小车当前的期望速度vel,其中所运用到的是高中物理公式Vt^2 - V0^2 = 2as。
●wp.twist.twist.linear.x = min(vel, wp.twist.twist.linear.x)表示在距离终点较远的位置,按照wp.twist.twist.linear.x的默认期望速度行驶,而在距离终点较近的位置,按照自定义的减速度开始减速行驶。1
2
3def distance(self, p1, p2):
x, y, z = p1.x - p2.x, p1.y - p2.y, p1.z - p2.z
return math.sqrt(x*x + y*y + z*z)
说明:
●该函数用于计算两个坐标点之间的距离。1
2def quaternion_from_yaw(self, yaw):
return tf.transformations.quaternion_from_euler(0., 0., yaw)
说明:
●该函数用于将欧拉角转换成四元数形式。1
2def kmph2mps(self, velocity_kmph):
return (velocity_kmph * 1000.) / (60. * 60.)
说明:
●该函数用于将单位为km/h的速度值转换成以m/s为单位。1
2
3
4
5
6
7def publish(self, waypoints, base_path):
lane = Lane()
lane.header.frame_id = '/world'
lane.header.stamp = rospy.Time(0)
lane.waypoints = waypoints
self.pub.publish(lane)
self.pub_path.publish(base_path)
说明:
●该函数用于发布话题消息waypoints和base_path。1
2
3
4
5
6
7
8
9def __init__(self):
rospy.init_node('waypoint_loader', log_level=rospy.DEBUG)
self.pub = rospy.Publisher('/base_waypoints', Lane, queue_size=1, latch=True)
self.pub_path = rospy.Publisher('/base_path', Path, queue_size=1, latch=True)
self.velocity = self.kmph2mps(rospy.get_param('~velocity'))
self.new_waypoint_loader(rospy.get_param('~path'))
rospy.spin()
说明:
●rospy.init_node(‘waypoint_loader’, log_level=rospy.DEBUG)用于初始化ROS节点,在节点完全初始化之前,消息不会出现在/rosout话题上,因此可能看不到初始消息。要想在/rosout上看到logdebug消息,可以将log_level参数传递给rospy.init_node()。
●self.pub = rospy.Publisher(‘/base_waypoints’, Lane, queue_size=1, latch=True)和self.pub_path = rospy.Publisher(‘/base_path’, Path, queue_size=1, latch=True)分别用于创建以/base_waypoints和/base_path为话题消息的发布者。其中latch=True将保存最后发布的消息并将其发送给连接的任何将来的订户,这对于诸如地图等缓慢变化的数据或静态数据很有用。
●self.velocity = self.kmph2mps(rospy.get_param(‘~velocity’))用于加载参数velocity的值,并转换成以m/s为单位。
●self.new_waypoint_loader(rospy.get_param(‘~path’))用于加载参数path所对应的文件路径,并发布相关的话题消息。
2.局部路径和历史路径的更新
waypoint_updater.py的作用是通过KD-tree查询距离小车最近的路径点,以该点为起始点设置局部路径,并在Rviz可视化工具中显示局部路径。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26def __init__(self):
rospy.init_node('waypoint_updater')
rospy.Subscriber('/smart/rear_pose', PoseStamped, self.pose_cb)
rospy.Subscriber('/base_waypoints', Lane, self.waypoints_cb)
self.final_waypoints_pub = rospy.Publisher('final_waypoints', Lane, queue_size=1)
self.final_path_pub = rospy.Publisher('final_path', Path, queue_size=1)
self.final_waypoints_pub = rospy.Publisher('real_waypoints', Lane, queue_size=1)
self.final_path_pub = rospy.Publisher('real_path', Path, queue_size=1)
# TODO: Add other member variables you need below
self.real_waypoints = []
self.base_waypoints = None
self.waypoints_2d = None
self.waypoint_tree = None
self.pose = None
# rospy.spin()
rate = rospy.Rate(20)
while not rospy.is_shutdown():
if self.pose and self.base_waypoints and self.waypoint_tree:
# Get closest waypoint
closest_waypoint_idx = self.get_closest_waypoint_idx()
self.publish_waypoints(closest_waypoint_idx)
rate.sleep()
说明:
●rospy.init_node(‘waypoint_updater’)用于初始化ROS节点。
●rospy.Subscriber(‘/smart/rear_pose’, PoseStamped, self.pose_cb)和rospy.Subscriber(‘/base_waypoints’, Lane, self.waypoints_cb)分别用于创建以/smart/rear_pose和/base_waypoints为话题消息的订阅者,其中/smart/rear_pose话题消息内容为小车后轮中心点的坐标,/base_waypoints 话题消息内容为全局路径点坐标及小车期望速度等,pose_cb和waypoints_cb分别为/smart/rear_pose和/base_waypoints的消息回调函数。
●self.final_waypoints_pub = rospy.Publisher(‘final_waypoints’, Lane, queue_size=1)和self.final_path_pub = rospy.Publisher(‘final_path’, Path, queue_size=1)分别创建以final_waypoints和final_path为话题消息的发布者,用于发布局部路径信息。
●self.final_waypoints_pub = rospy.Publisher(‘real_waypoints’, Lane, queue_size=1)和self.final_path_pub = rospy.Publisher(‘real_path’, Path, queue_size=1)分别创建以real_waypoints和real_path为话题消息的发布者,用于发布历史路径信息。
●rate = rospy.Rate(20)用于设置ROS节点的更新频率为20Hz。
●while not rospy.is_shutdown():表示在ROS节点未关闭的条件下,执行下面的操作。
●if self.pose and self.base_waypoints and self.waypoint_tree:表示在pose、base_waypoints和waypoint_tree话题消息内容非空的条件下,执行下面的操作。
●closest_waypoint_idx = self.get_closest_waypoint_idx()的作用是返回一个距离当前小车位置最近的路径点的横坐标x。
●self.publish_waypoints(closest_waypoint_idx)用于发布话题消息closest_waypoint_idx。1
2def pose_cb(self, msg):
self.pose = msg
说明:
●该函数为/smart/rear_pose话题消息的回调函数,作用是将该话题消息内容赋给self.pose。1
2
3
4
5def waypoints_cb(self, waypoints):
self.base_waypoints = waypoints
if not self.waypoints_2d:
self.waypoints_2d = [[waypoint.pose.pose.position.x, waypoint.pose.pose.position.y] for waypoint in waypoints.waypoints]
self.waypoint_tree = KDTree(self.waypoints_2d)
说明:
●该函数为/base_waypoints话题消息的回调函数。
●self.waypoints_2d = [[waypoint.pose.pose.position.x, waypoint.pose.pose.position.y] for waypoint in waypoints.waypoints]将waypoints话题消息中的x、y轴坐标提取到一个二维列表self.waypoints_2d中。二维列表self.waypoints_2d的内容如下: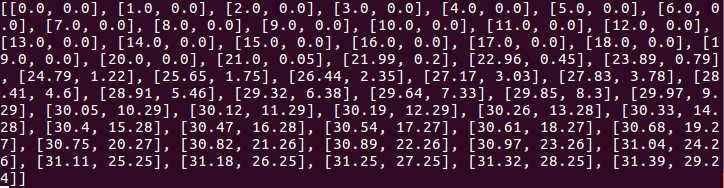
●self.waypoint_tree = KDTree(self.waypoints_2d)的作用是构建一个二维的KD-tree。1
2
3
4
5
6
7
8
9
10
11
12def get_closest_waypoint_idx(self):
x = self.pose.pose.position.x
y = self.pose.pose.position.y
q = Waypoint()
q.pose.pose.position.x = x
q.pose.pose.position.y = y
self.real_waypoints.append(q)
closest_idx = self.waypoint_tree.query([x,y],1)[1]
return closest_idx
说明:
●q = Waypoint()的作用是创建一个Waypoint类型的对象q,包含坐标点信息。
●self.real_waypoints.append(q)的作用是将最新的实时位置信息添加到列表中。
●closest_idx = self.waypoint_tree.query([x,y],1)[1]的作用是在KD-tree中查询距离当前小车位置最近的一个路径点的横坐标x。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31def publish_waypoints(self, closest_idx):
# fill in final waypoints to publish
lane = Lane()
lane.header = self.base_waypoints.header
lane.waypoints = self.base_waypoints.waypoints[closest_idx:closest_idx + LOOKAHEAD_WPS]
real_lane = Lane()
real_lane.header = self.base_waypoints.header
real_lane.waypoints = self.real_waypoints
# fill in path for visulization in Rviz
path = Path()
path.header.frame_id = '/world'
for p in lane.waypoints:
path_element = PoseStamped()
path_element.pose.position.x = p.pose.pose.position.x
path_element.pose.position.y = p.pose.pose.position.y
path.poses.append(path_element)
real_path = Path()
real_path.header.frame_id = '/world'
for m in real_lane.waypoints:
real_path_element = PoseStamped()
real_path_element.pose.position.x = m.pose.pose.position.x
real_path_element.pose.position.y = m.pose.pose.position.y
real_path.poses.append(real_path_element)
self.final_waypoints_pub.publish(lane)
self.final_path_pub.publish(path)
self.final_waypoints_pub.publish(real_lane)
self.final_path_pub.publish(real_path)
说明:
●lane = Lane()的作用是创建一个Lane类型的对象lane。
●lane.waypoints = self.base_waypoints.waypoints[closest_idx:closest_idx + LOOKAHEAD_WPS]的作用是将距离小车最近的路径点以及之后的LOOKAHEAD_WPS个路径点信息填充到final_waypoints话题消息中,其中LOOKAHEAD_WPS是自定义的局部路径点个数。
●path.header.frame_id = ‘/world’设置/world为局部路径可视化的参考系坐标。
●for p in lane.waypoints:的作用是遍历上述的局部路径点。
●path_element.pose.position.x = p.pose.pose.position.x和path_element.pose.position.y = p.pose.pose.position.y是将局部路径点的坐标信息填充到final_path话题信息中,用于在Rviz可视化工具中显示局部路径。
●self.final_waypoints_pub.publish(lane)和self.final_path_pub.publish(path)的作用是发布话题消息final_waypoints和final_path。
●历史路径消息real_path和real_lane的创建和定义同理。
3.路径可视化
打开一个新的终端,输入如下指令:1
$ rosrun rviz rviz
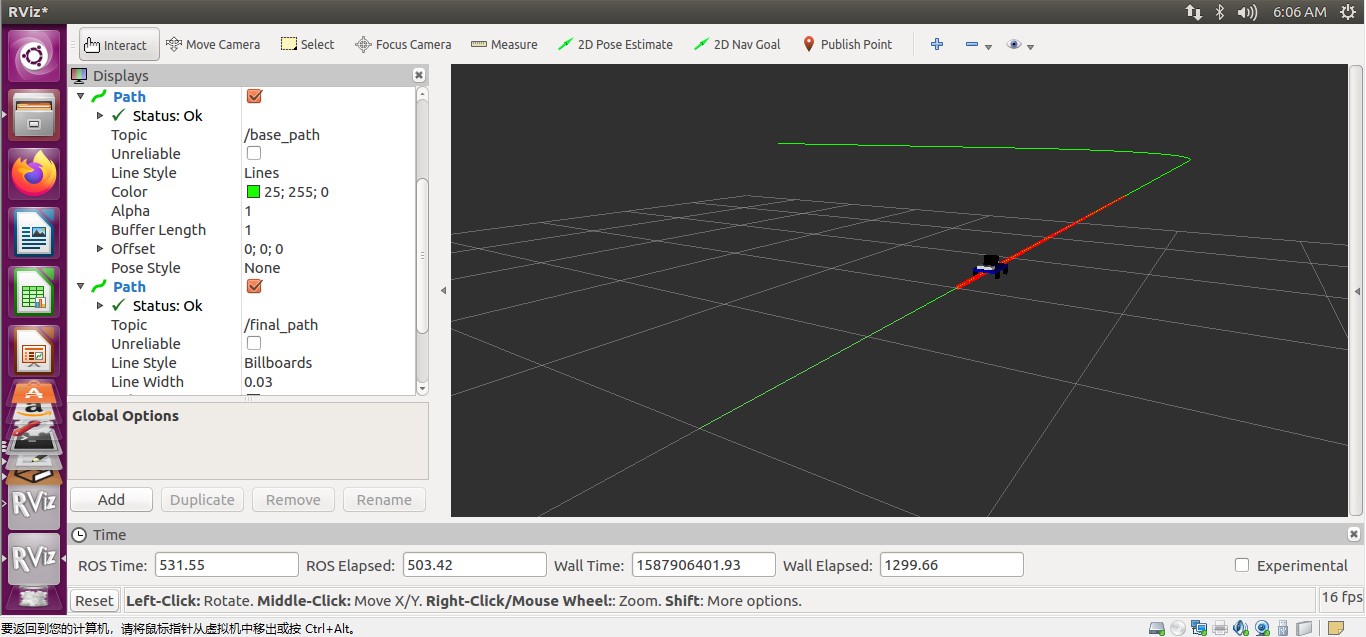
在左菜单栏中加入两个Path的可视化插件,分别将Topic设置为/base_path和/final_path,即全局路径和局部路径。显示效果如下图。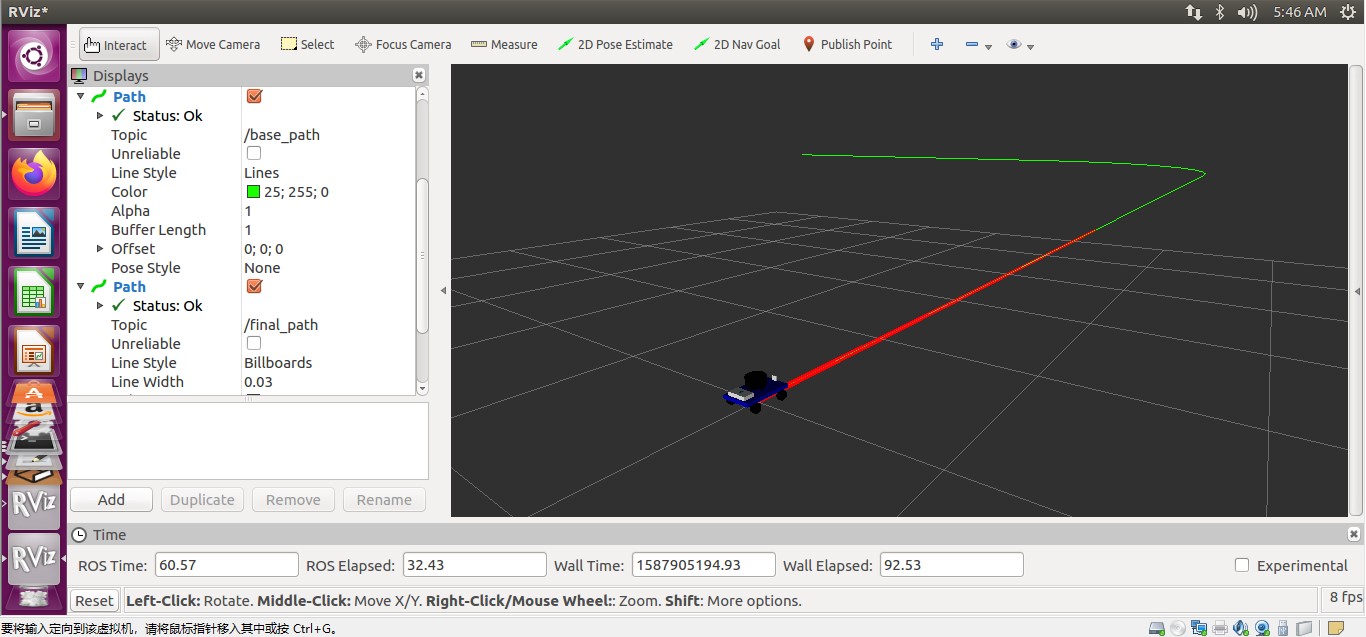
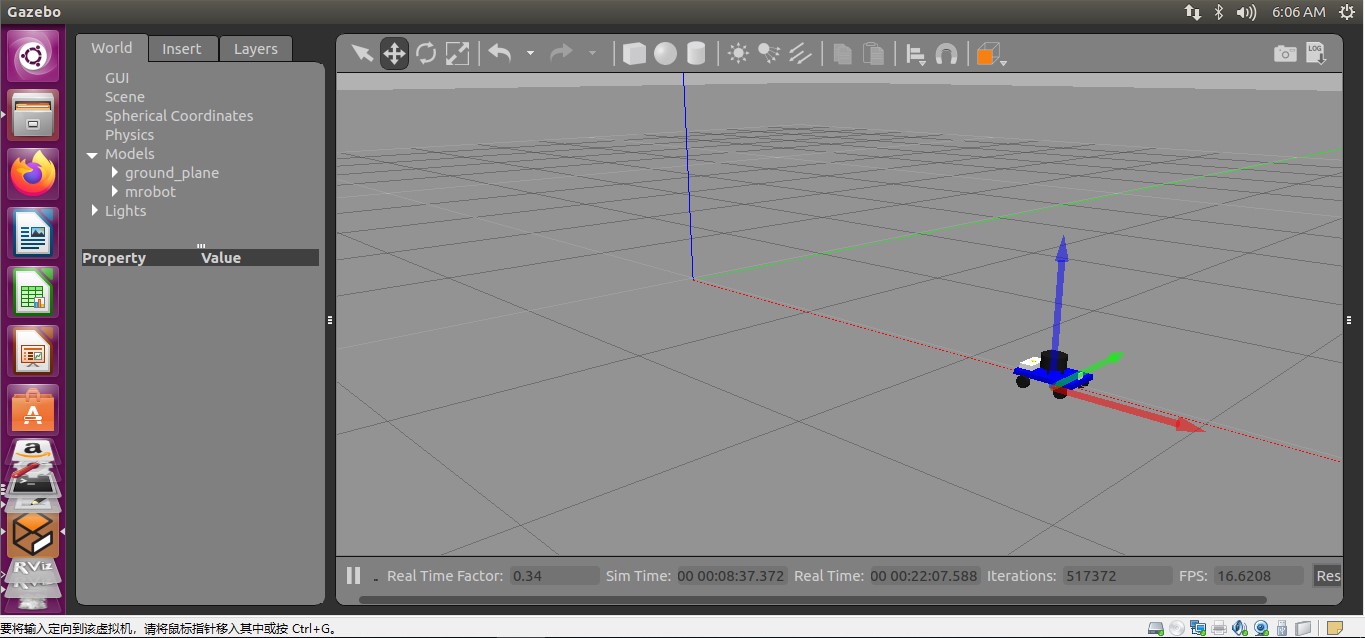
在Gazebo中移动小车模型,由于小车当前位置发生变化,局部路径也因此发生变化,如下图中Rviz所显示。