1.创建功能包
在ROS工作空间ROS_ws的src文件夹目录下创建一个功能包,命名为action_task。
2.节点编程与动作消息定义
2.1案例说明
客户端发送一个运动目标,模拟机器人运动到目标位置的过程,包含服务端和客户端的代码实现,要求带有实时位置反馈。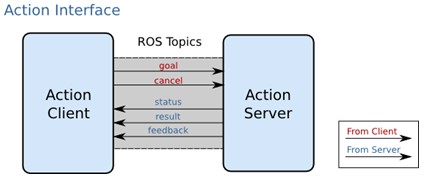
2.2动作消息的定义
在功能包目录下创建一个新的文件夹,命名为action,并在此文件夹中创建一个空文件Motion.action。
在Motion.action文件中输入以下代码,定义动作消息内容。1
2
3
4
5
6
7
8
9
10//定义机器人运动终点坐标endx,endy
uint32 endx
uint32 endy
---
//定义机器人动作完成标志位
uint32 Flag_Finished
---
//定义机器人当前位置坐标coordinate_x,coordinate_y
uint32 coordinate_x
uint32 coordinate_y
说明:
动作(Action)通信接口提供了五种消息定义,分别为goal、cancel、status、feedback和result,而.action文件用来定义其中三种消息,按顺序分别为goal、result和feedback,与.srv文件中的服务消息定义方式一样,使用“—-”作为分隔符。
Motion.action文件经过编译后生成MotionAction.h、MotionActionFeedback.h和MotionGoal.h等多个头文件,文件位置在ROS_ws工作空间下的devel/include/action_task文件夹内,如下图。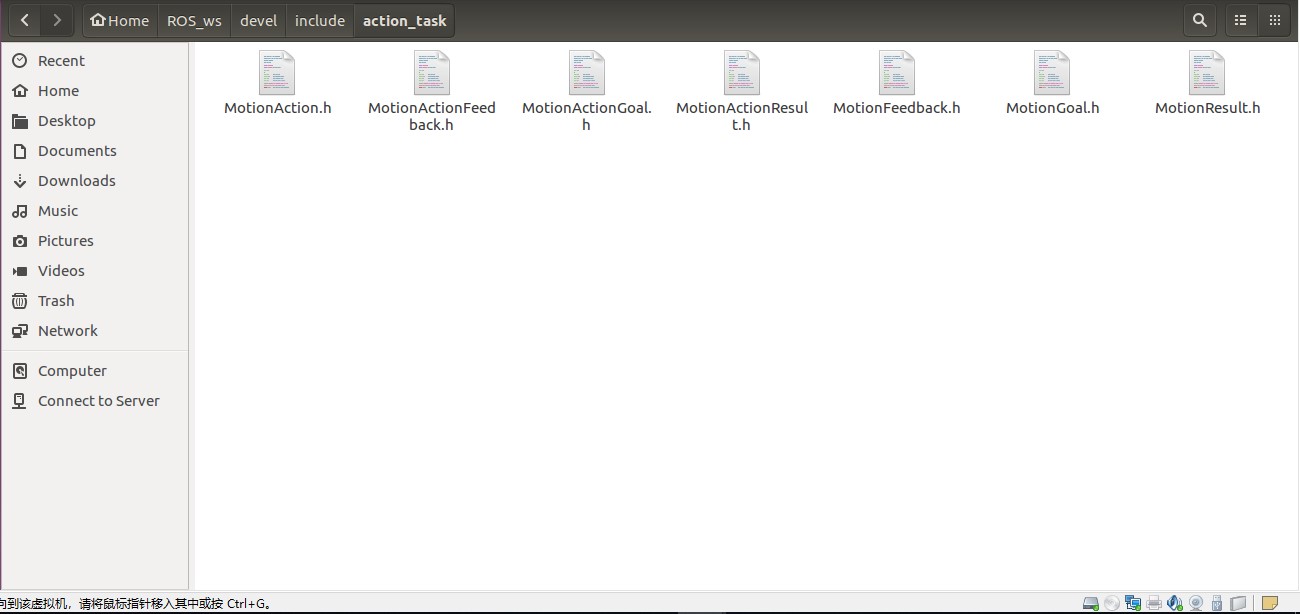
附相关资料:http://wiki.ros.org/actionlib#Tutorials
2.3创建.cpp文件
在功能包下面的action文件夹目录下创建一个空文件robotclient.cpp。
2.4动作客户端编程
打开上面所创建的文件robotclient.cpp,输入以下代码。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51#include <ros/ros.h>
#include <actionlib/client/simple_action_client.h>
#include "action_task/MotionAction.h"
typedef actionlib::SimpleActionClient<action_task::MotionAction> Client;
//当动作完成后,调用该回调函数一次
void doneCb(const actionlib::SimpleClientGoalState& state,
const action_task::MotionResultConstPtr& result)
{
ROS_INFO("The robot has arrived at the destination.");
ros::shutdown();
}
//当动作被激活,调用该函数一次
void activeCb()
{
ROS_INFO("Goal just went active");
}
//接收到feedback后,调用该回调函数
void feedbackCb(const action_task::MotionFeedbackConstPtr& feedback)
{
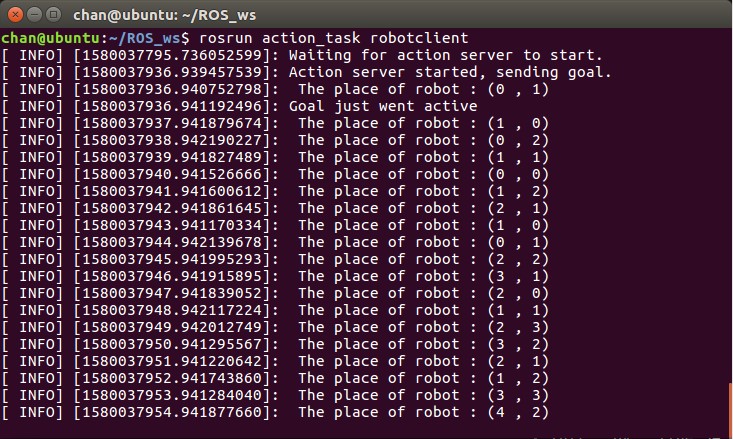
ROS_INFO(" The place of robot : (%d , %d) ", feedback->coordinate_x, feedback->coordinate_y);
}
int main(int argc, char** argv)
{
//初始化ROS节点
ros::init(argc, argv, "robot_client");
//创建一个action客户端
Client client("robot_motion", true);
//等待action服务器响应
ROS_INFO("Waiting for action server to start.");
client.waitForServer();
ROS_INFO("Action server started, sending goal.");
//创建一个action目标
action_task::MotionGoal goal;
goal.endx = 5;
goal.endy = 4;
//发送action目标给服务器,并设置回调函数
client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb);
ros::spin();
return 0;
}
说明:
◆头文件actionlib/client/simple_action_client.h用于实现简单的动作客户端。其中actionlib软件包提供了创建执行长期目标的服务器,以及一个客户端接口,以便将请求发送到服务器。
◆头文件action_task/MotionAction.h是由Motion.action文件编译生成,定义了动作消息内容,该文件存放在ROS_ws工作空间下的devel/include/action_task文件夹中。
◆typedef actionlib::SimpleActionClient
◆doneCb(const actionlib::SimpleClientGoalState& state, const action_task::MotionResultConstPtr& result)该函数在服务器完成任务后,通知客户端调用一次,调用该回调函数后ROS系统在终端界面输出字符串”The robot has arrived at the destination.”表明动作完成,同时ros::shutdown()关闭客户端节点,终止所有开放的订阅,发布,服务及调用。
◆void activeCb()该函数是在动作服务器被激活后,通知客户端开始执行任务的回调函数,调用该回调函数后ROS系统在终端界面输出字符串”Goal just went active”表明action被激活。
◆void feedbackCb(const action_task::MotionFeedbackConstPtr& feedback)该函数是在动作服务器执行任务过程中,通知客户端机器人当前坐标的回调函数。const action_task::MotionFeedbackConstPtr& feedback这里存放的是由主调函数放进来的实参变量feedback的地址,通过引用传递给回调函数。调用该回调函数后ROS系统在终端界面输出当前机器人位置的横纵坐标。
◆main函数中首先使用ros::init()初始化ROS节点,将该节点命名为robot_client。
◆Client client(“robot_motion”, true);的作用是创建一个action_task::MotionAction类型的action客户端。Client是之前已经使用typedef重新声明定义的actionlib::SimpleActionClient
◆client.waitForServer()函数的作用是等待客户端连接到动作服务器,否则客户端将停在这里一直处于等待,不过也可以使用ros::duration()函数作为参数设置等待时间。
◆action_task::MotionGoal goal是创建一个action_task::MotionGoal类的对象goal,并为goal成员endx、endy即终点坐标赋值。
◆client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb);的作用是发送一个目标值到action服务器,并设置多个回调函数检测goal的执行情况(action服务器和客户端分别在接收和发送goal之后会通过状态机追踪goal的状态,并采取相应的处理)。
◆ros::spin();的作用是让程序进入自循环的挂起状态,从而让程序以最好的效率接收客户端的请求并调用回调函数。
2.5action服务器编程
在src文件夹下再创建一个空文件robotserver.cpp,输入以下代码。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128#include <ros/ros.h>
#include <actionlib/server/simple_action_server.h>
#include "action_task/MotionAction.h"
#define wid 5
#define hig 5
typedef actionlib::SimpleActionServer<action_task::MotionAction> Server;
//定义结构体
struct note
{
int x;//横坐标
int y;//纵坐标
int f;//父节点在队列中的编号
int s;//步数
};
//接收到action的goal之后,调用该回调函数一次
void execute(const action_task::MotionGoalConstPtr& goal, Server* as)
{
struct note que[40];//定义一个note结构体的队列
//定义地图大小及形式,1为障碍物,0为正常道路
int map[6][6]={{0, 0, 1, 0, 0, 1},
{1, 0, 1, 0, 0, 0},
{1, 0 ,0, 1, 0, 1},
{0, 1, 0, 0, 0, 0},
{0, 0, 0, 1, 1, 0},
{1, 0, 0, 1, 0, 0}};
//记录哪些点已经在队列中,防止一个点被重复扩展
int book[6][6]={0};
//定义一个表示走的方向的数组
int next[4][2]={{0,1}, //向右
{1,0}, //向下
{0,-1},//向左
{-1,0}};//向上
int head, tail;
int j, k, l;
int startx = 0, starty = 0;
int p,q,tx,ty,flag;
ros::Rate r(1); //设置ROS系统延时频率
action_task::MotionFeedback feedback; //创建一个feedback对象
//初始化队列
head=0;//head point to the point needed to expand
tail=0;//tail point to the point expanded
//定义起点坐标
que[tail].x=startx;
que[tail].y=starty;
que[tail].f=0;
que[tail].s=0;
tail++;
book[startx][starty]=1;
flag=0;//用来标记是否到达目标点,0表示还没有到达,1表示已到达
//当队列不为空时循环
while(head<tail)
{
//枚举四个方向
for(k=0;k<=3;k++)
{
//计算下一个点的坐标
tx=que[head].x+next[k][0];
ty=que[head].y+next[k][1];
//判断是否越界
if(tx<0 || tx>wid || ty<0 || ty>hig)
continue;
//判断是否为障碍物或已经在路径中
if(map[tx][ty]==0 && book[tx][ty]==0)
{
//标记这个点已经被走过
book[tx][ty]=1;
//插入新的坐标到队列中
que[tail].x=tx;
que[tail].y=ty;
que[tail].f=head;
que[tail].s=que[head].s+1;
tail++;
}
feedback.coordinate_x = tx;
feedback.coordinate_y = ty;
as->publishFeedback(feedback);//按照1Hz的频率发送机器人当前坐标位置
r.sleep();//延时至1s
if(tx==goal->endx && ty==goal->endy)
{
flag=1;//到达目标点后标志位flag置1
break;
}
}
if(flag==1)
break;
head++;
}
//表示已经发送成功
as->setSucceeded();
}
int main(int argc, char** argv)
{
//初始化ROS节点
ros::init(argc, argv, "robot_server");
//创建节点句柄
ros::NodeHandle n;
//创建一个action服务器
Server server(n, "robot_motion", boost::bind(&execute, _1, &server), false);
//启动action服务器
server.start();
ros::spin();
return 0;
}
说明:
◆头文件ros/ros.h包含了标准ROS类的声明,在每一个ROS程序中都需要包含它。
◆头文件actionlib/server/simple_action_server.h用于实现简单的动作服务端。
◆头文件action_task/MotionAction.h 是由Motion.action文件编译生成,定义了动作消息内容,该文件存放在ROS_ws工作空间下的devel/include/action_task文件夹中。
◆typedef actionlib::SimpleActionServer
◆void execute(const action_task::MotionGoalConstPtr& goal, Server as)当action服务器接收到客户端的goal时调用该回调函数。其中第一个参数是通过引用向回调函数传递的指向goal的指针,goal的消息类型为action_task::MotionGoal,第二个参数是actionlib::SimpleActionServer类的指针as,消息类型为action_task::MotionAction。
◆在execute()回调函数中通过建立一个6×6的数组模拟机器人运行的地图,根据action客户端发来的goal目标点坐标,使用广度优先搜索算法寻找可运行的路径,服务器按照1Hz频率发布feedback。
◆ros::Rate r(1);的作用是设置feedback发布频率为1Hz。
◆action_task::MotionFeedback feedback;的作用是创建一个action_task::MotionFeedback类的对象feedback。
◆as->publishFeedback(feedback);调用指针as指向的actionlib::SimpleActionServer类所包含的publishFeedback()函数,publishFeedback (const Feedback &feedback)函数用于发布feedback。
◆r.sleep();该函数并不是必要的,这里的作用是为了延时,让服务器保证以1Hz的频率发布feedback。
◆as->setSucceeded();调用指针as指向的actionlib::SimpleActionServer类所包含的setSucceeded ()函数,setSucceeded (const Result &result=Result(), const std::string &text=std::string(“”))函数中第一个参数表示动作执行任务的结果result,默认为0,第二个参数是有关状态更改的文本消息,两个参数均可省略。
◆main函数中一开始都是类似的,初始化ROS节点,创建节点句柄,从而启动ROS节点。
◆Server server(n, “robot_motion”, boost::bind(&execute, _1, &server), false);的作用是创建一个action服务器,其中第一个参数表示所创建节点句柄名;第二个参数表示服务器与客户端之间通信的消息名;第三个参数表示所要调用的回调函数,当接收到新的goal后,就会在单独的线程中调用该回调函数。boost::bind()函数用来向一个函数(或函数对象)绑定某些参数,返回值是一个函数对象,其中第一个参数是需要绑定的原始函数的地址,此处为&execute,第二个参数是需要绑定到原始函数excute()的第一个参数值,而此处_1表示execute(const action_task::MotionGoalConstPtr& goal, Server as)函数的第一个参数不需要绑定,因此使用_1占位,第三个参数是需要绑定到原始函数excute()的第二个参数值,此处为&server表示将server对象的地址绑定到execute()函数中的Server* as指针。server(n, “robot_motion”, boost::bind(&execute, _1, &server), false)中的第四个参数是一个bool值,它的作用是通知action服务器是否在被创建后立即开始发布,此参数应当始终设置为false,并且在服务器被创建后调用start()。
◆server.start();的作用是启动action服务器,使用时需保证创建action服务器时第四个参数auto_start设置为false。
◆ros::spin();的作用是让程序进入自循环的挂起状态,从而让程序以最好的效率接收客户端的请求并调用回调函数。
附相关资料:
1.http://wiki.ros.org/actionlib_tutorials/Tutorials/SimpleActionServer%28ExecuteCallbackMethod%29
2.https://docs.ros.org/diamondback/api/actionlib/html/classactionlib_1_1SimpleActionServer.html
3.http://docs.ros.org/melodic/api/actionlib/html/classactionlib_1_1ServerGoalHandle.html#ac297923512ac62c9f10a801571b29738
3.配置与编译
3.1在CMaKeLists.txt中添加编译选项
打开功能包中的CMaKeLists.txt文件,在如下位置的find_package中添加功能包actionlib和actionlib_msgs,以便于(节点)调用它们生成消息。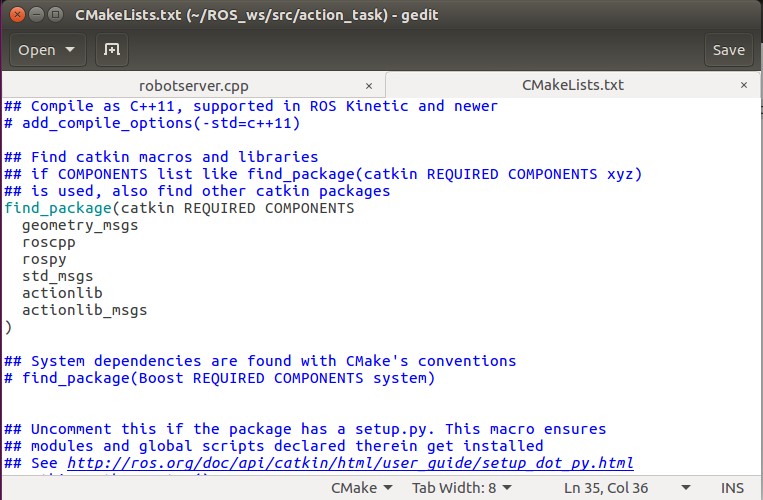
在如下位置添加相关的.action文件,确保了CMake在重新配置时知道这些新添加的.action文件,同时添加.action文件在生成消息时的所有依赖项(功能包)。1
2
3add_action_files(DIRECTORY action FILES Motion.action)
generate_messages(DEPENDENCIES actionlib_msgs std_msgs)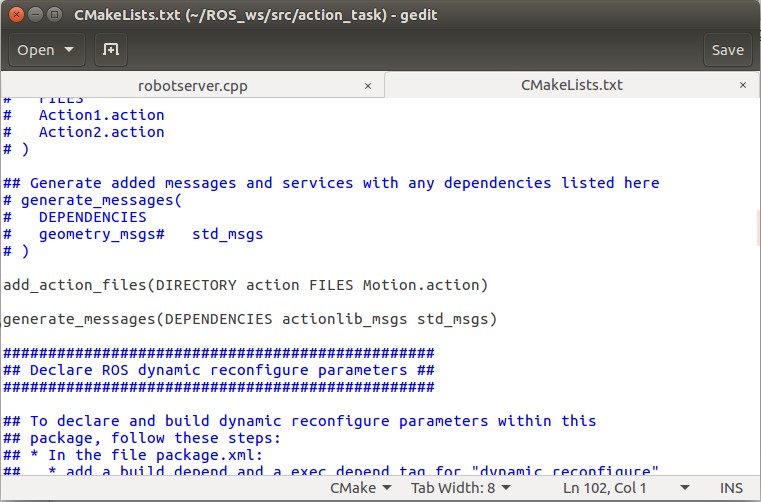
将如下位置中CATLIN_DEPENDS前面的“#”去掉,使能相关的依赖项。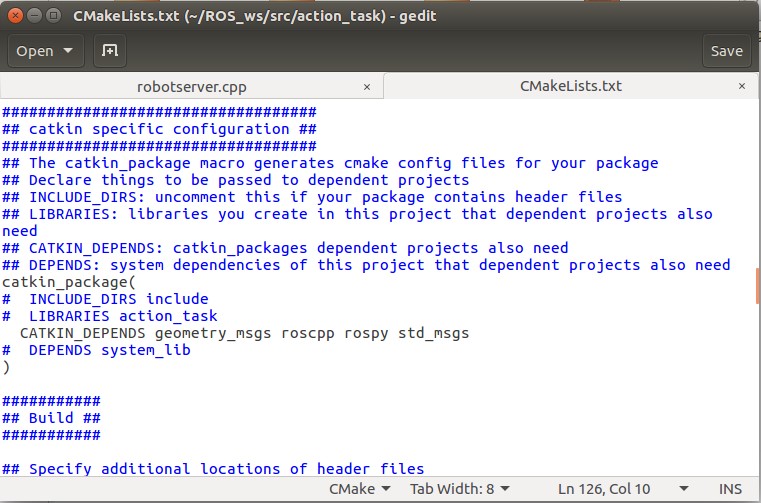
在如下位置进行配置,add_executable(robotclient src/robotclient.cpp)的作用是将src文件夹下的robotclient.cpp文件编译成名为robotclient的可执行文件。target_link_libraries(robotclient ${catkin_LIBRARIES})的作用是将robotclient可执行文件与ROS相关的库链接。add_dependencies(robotclient ${${PROJECT_NAME}_EXPORTED_TARGETS})的作用是创建一个显式的依赖,以便相关文件能以正确的顺序编译。1
2
3
4
5
6
7add_executable(robotclient src/robotclient.cpp)
target_link_libraries(robotclient ${catkin_LIBRARIES})
add_dependencies(robotclient ${${PROJECT_NAME}_EXPORTED_TARGETS})
add_executable(robotserver src/robotserver.cpp)
target_link_libraries(robotserver ${catkin_LIBRARIES})
add_dependencies(robotserver ${${PROJECT_NAME}_EXPORTED_TARGETS})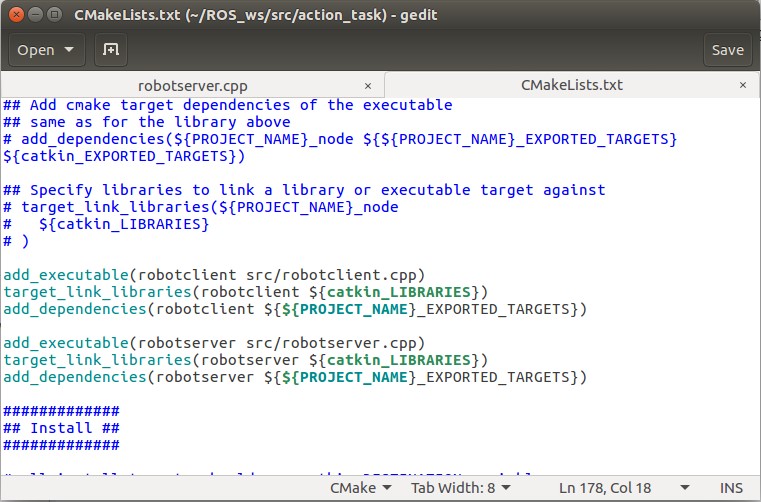
3.2在package.xml中添加功能包依赖
打开功能包中的package.xml文件,在如下位置添加功能包依赖。<build_depend>actionlib</build_depend>表示在编译时会依赖actionlib功能包。<exec_depend>actionlib</exec_depend>表示在运行时会依赖actionlib功能包。1
2
3
4<build_depend>actionlib</build_depend>
<build_depend>actionlib_msgs</build_depend>
<exec_depend>actionlib</exec_depend>
<exec_depend>actionlib_msgs</exec_depend>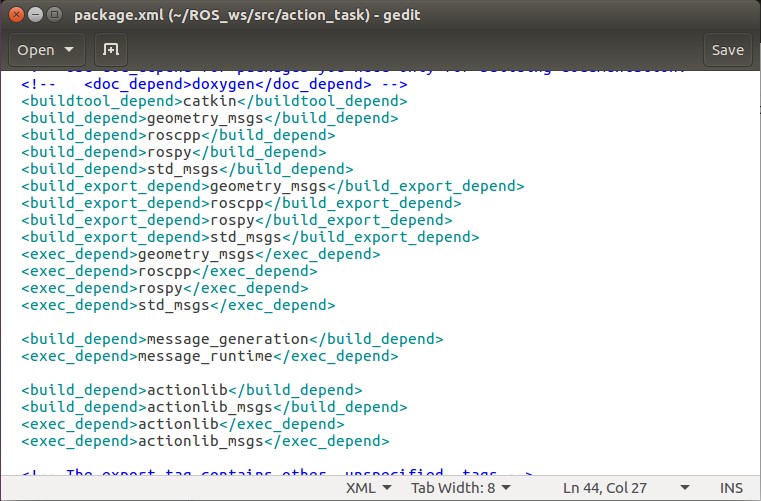
3.3编译文件
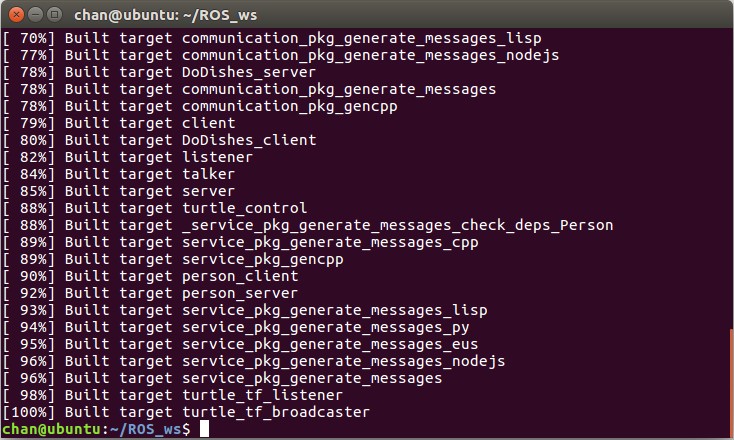
在/ROS_ws文件夹路径下打开一个新的终端,输入以下代码进行编译。1
$ catkin_make
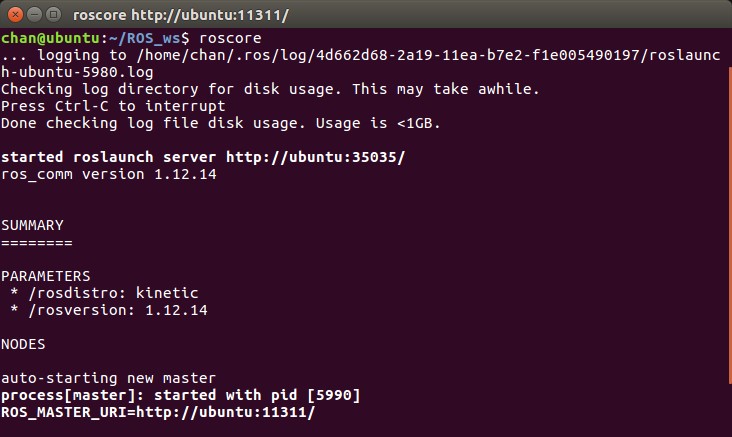
编译完成后,输入以下代码运行主节点。1
$ roscore
打开一个新的终端,配置环境变量后,输入以下代码运行客户端。1
$ rosrun action_task robotclient
打开一个新的终端,配置环境变量后,输入以下代码运行服务器。1
$ rosrun action_task robotserver
若想停止运行,关闭终端,使用快捷键Ctrl+c即可。
4.话题可视化
打开一个新的终端,在action服务器及客户端运行时输入以下代码。1
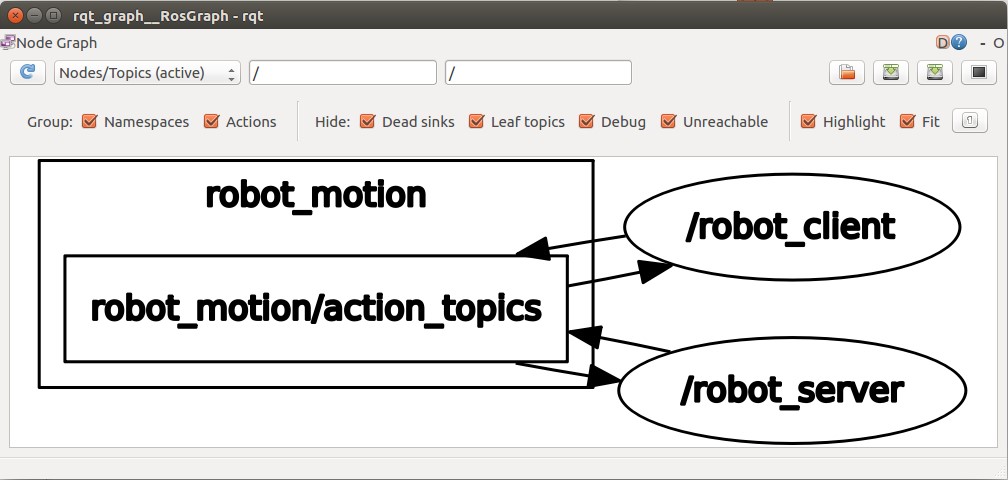
$ rqt_graph
由此可以得到如下的基于Qt的GUI界面,直观地看到动作通信的节点和消息。