Github链接:https://github.com/chanchanchan97/ROS
1.模型描述
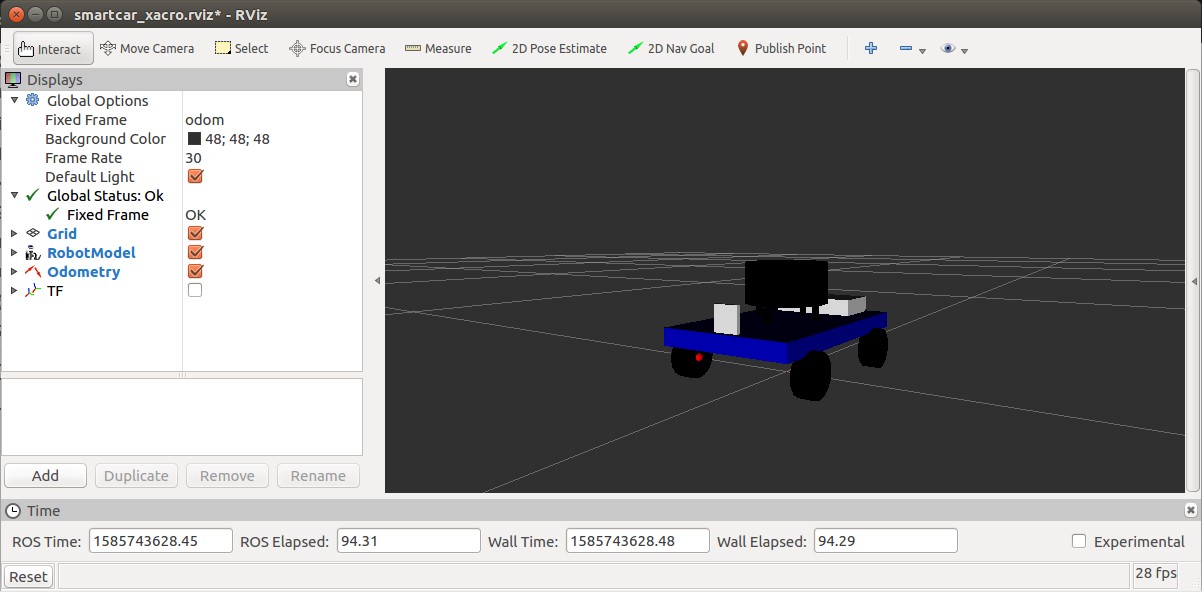
本项目的目的是创建一个基于阿克曼转向机构(Ackermann steering)的自动驾驶小车模型,该模型在之前URDF模型的基础上修改了前轮转向轴的形状与位置,修改了前端摄像头的位置和尺寸,并且添加了激光雷达和树莓派的简易模型。
2.xacro模型与URDF模型的区别
2.1URDF模型存在的问题
●模型冗长,重复内容过多;
●参数修改麻烦,不便于二次开发;
●没有参数计算功能。
2.2xacro模型的特点
●精简模型代码
(1)创建宏定义
(2)文件包含
●提供可编程接口
(1)常量
(2)变量
(3)数学计算
(4)条件语句
3.xacro优化方法
3.1常量定义
1 | <xacro:property name="M_PI" value="3.14159"/> |
定义标签:xacro:property后面跟两个参数属性:
(1)name所定义的常量名;
(2)value常量名对应的常量值。
3.2常量使用
1 | <origin xyz="0 0 0" rpy="${M_PI/2} 0 0"/> |
定义标签:${ }在括号里使用常量,也可以进行数学运算(所有数学运算都会转换成浮点数进行,以保证运算精度)。
3.3宏定义
1 | <xacro:macro name="cylinder_inertial_matrix" params="m r h"> |
定义标签:xacro:macro 后面跟两个参数属性:
(1)name宏定义的名字类似函数名;
(2)params类似函数参数,也可以是字符串。
3.4宏调用
1 | <cylinder_inertial_matrix m="1" r="0.025" h="0.02"/> |
定义标签:首先调用宏定义的名字,然后为参数赋值。
3.5文件包含
1 | <xacro:include filename="$(find smartcar_description)/urdf/xacro/smartcar_sim.xacro"/> |
定义标签:xacro:include $(find+功能包)=包的具体路径
4.创建xacro文件
在urdf文件夹下创建一个新的文件夹xacro,并且在xacro文件夹中创建一个.xacro文件。
5.xacro模型显示
5.1将xacro文件转化成URDF文件
在xacro文件夹中打开一个新的终端,输入以下指令:1
$ rosrun xacro xacro.py smartcar.xacro > smartcar.urdf
此时xacro文件夹下会生成一个.urdf文件。
5.2直接调用xacro文件解析器
这种方法更为常见,在launch文件中加入如下代码,从而实现.xacro文件的转换。1
2
3<arg name="urdf_file" default="$(find xacro)/xacro --inorder '$(find smartcar_description)/urdf/xacro/smartcar.xacro'" />
<param name="robot_description" command="$(arg urdf_file)" />
5.3启动Rviz
打开一个新的终端,输入以下指令,启动Rviz,查看所创建的模型。1
roslaunch smartcar_description smartcar_rviz.launch